I've post this thread in the wrong section before, so here we go.
My Z is using this KL34 Stepper with G201X Gecko. I wired the stepper motor as bipolar parrarell.
![]()
It then goes to G201X pins
![]()
This then go to C10 BOB
![]()
I've set the curent setting to be 6.2 Amp on this
![]()
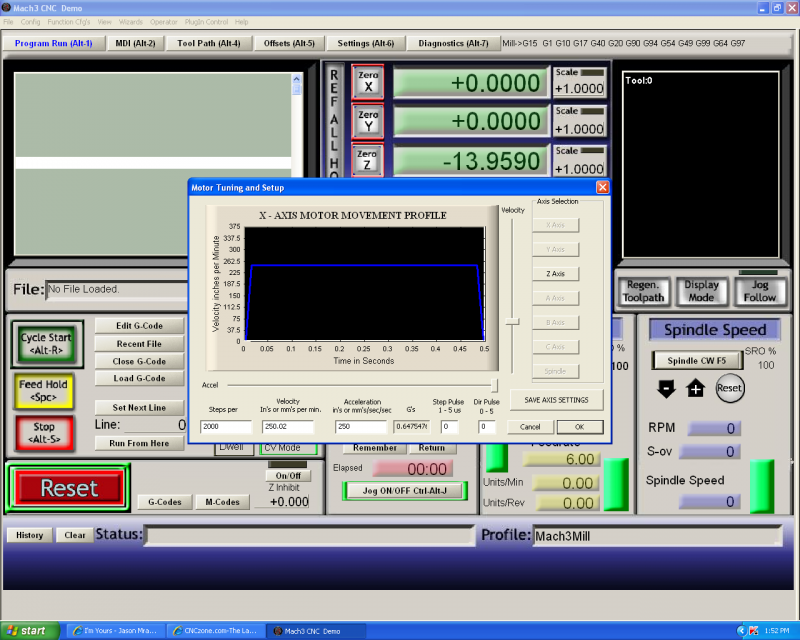
Here is my motor tuning page off Mach3. At that velocity and acceleration, it was about to explode I think, the motor was grinding and moaning, jumpy, you named it. I can crack the handle manually and nothing seemed to bind.
![]()
Nothing fancy, I'm sure you folks have seen this often.
My questions:
1. When I played with the motor tuning acceleration and velocity profile, the best setting was 50 in/min on velocity and acceleration. If I go higher, the motor is rough and jumpy. I've ran the KL34 with KL6050 and got much better result
2. When I changed the Gecko G201X current setting and play with the motor setting, it didn't seems to make any different at all.
3. I adjusted the potentiometer for smoothness on the back of the G201X driver and again nothing happened other then motor high pitch noise.
What did I do wrong here. I was able to tune the X and Y (using KL23 stepper and KL 6050) at 200inch/min Velocity & Acceleration and they run quite and nice.
Thanks guy
My Z is using this KL34 Stepper with G201X Gecko. I wired the stepper motor as bipolar parrarell.

It then goes to G201X pins

This then go to C10 BOB

I've set the curent setting to be 6.2 Amp on this

Here is my motor tuning page off Mach3. At that velocity and acceleration, it was about to explode I think, the motor was grinding and moaning, jumpy, you named it. I can crack the handle manually and nothing seemed to bind.
Nothing fancy, I'm sure you folks have seen this often.
My questions:
1. When I played with the motor tuning acceleration and velocity profile, the best setting was 50 in/min on velocity and acceleration. If I go higher, the motor is rough and jumpy. I've ran the KL34 with KL6050 and got much better result
2. When I changed the Gecko G201X current setting and play with the motor setting, it didn't seems to make any different at all.
3. I adjusted the potentiometer for smoothness on the back of the G201X driver and again nothing happened other then motor high pitch noise.
What did I do wrong here. I was able to tune the X and Y (using KL23 stepper and KL 6050) at 200inch/min Velocity & Acceleration and they run quite and nice.
Thanks guy